P450—讓無人機(jī)更智能,讓科研更高效
Prometheus 450(P450)是阿木實(shí)驗(yàn)室專為科研工作者及無人機(jī)開發(fā)者設(shè)計(jì)并打造的無人機(jī)飛行平臺(tái),適用于無人機(jī)專業(yè)應(yīng)用研究和開發(fā)。
P450遵循“讓研發(fā)更高效”的設(shè)計(jì)理念,搭載開源飛控PX4及開源自主無人機(jī)軟件平臺(tái)Prometheus,提供豐富的demo例程,涵蓋控制、規(guī)劃、SLAM、目標(biāo)檢測(cè)、深度學(xué)習(xí)、集群控制等多個(gè)無人機(jī)及人工智能相關(guān)研究方向,旨在為無人機(jī)的智能與自主飛行提供全套解決方案。
P450的迭代亮點(diǎn)
P450基于Pixhawk V4開源飛控架構(gòu),通過內(nèi)走線設(shè)計(jì)集成了高性能旋翼動(dòng)力系統(tǒng),使用者可輕易實(shí)現(xiàn)室內(nèi)/室外的簡(jiǎn)易飛行控制;同時(shí)搭載Nvidia Jetson Xavier NX機(jī)載計(jì)算機(jī),內(nèi)置ROS(機(jī)器人操作系統(tǒng))環(huán)境下的無人機(jī)控制程序與多種前沿算法,可一鍵實(shí)現(xiàn)目標(biāo)識(shí)別、激光SLAM、視覺避障等功能。所有功能及相關(guān)算法均通過開源項(xiàng)目Prometheus發(fā)布了源代碼與仿真腳本,使P450在用戶手中真正做到到手即飛,即刻開發(fā)。
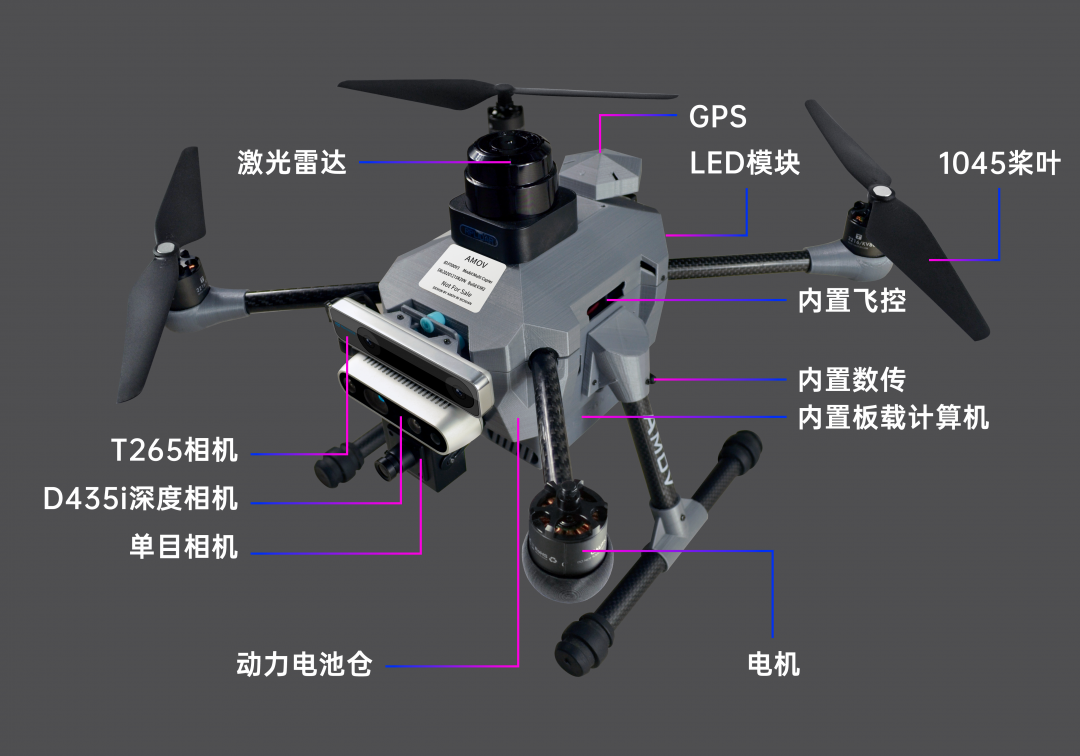
作為Prometheus系列的第三代無人機(jī)平臺(tái),P450采用了3D打印外殼&輕量化碳管機(jī)架的設(shè)計(jì)。在維持以往型號(hào)續(xù)航時(shí)間的前提下,提高了傳感器的搭載量,可在Prometheus系統(tǒng)的支持下,實(shí)現(xiàn)更多、更豐富的功能。同時(shí),P450作為具備高拓展性的二次開發(fā)平臺(tái),也支持使用者自行加裝其他設(shè)備,滿足不同的研發(fā)需求。
P450搭載了Prometheus V1.0系統(tǒng)。經(jīng)過一年多的維護(hù)與整合,Prometheus項(xiàng)目組將迄今為止在無人機(jī)上集成的功能進(jìn)行了高度整合與優(yōu)化,發(fā)布了首個(gè)泛用性開源無人機(jī)操作系統(tǒng)Prometheus V1.0。作為首個(gè)獲得該系統(tǒng)支持的開發(fā)套件,P450可為無人機(jī)開發(fā)者提供嶄新的開發(fā)體驗(yàn)。開發(fā)者在P450的使用過程中,無需再對(duì)PX4和ROS的進(jìn)行重復(fù)性學(xué)習(xí),耗費(fèi)時(shí)間在底層控制的調(diào)試上;僅需在Prometheus V1.0系統(tǒng)中,專注于算法開發(fā)與實(shí)機(jī)驗(yàn)證。
關(guān)于Prometheus項(xiàng)目:
Prometheus是一套開源的自主無人機(jī)軟件平臺(tái),為無人機(jī)的智能與自主飛行提供全套解決方案。本項(xiàng)目集成了PX4開源飛控固件與ROS開發(fā)環(huán)境,可為開發(fā)者提供成熟可用的機(jī)載電腦端開發(fā)程序,實(shí)現(xiàn)更加簡(jiǎn)潔快速的開發(fā)體驗(yàn)。目前已集成建圖、定位、規(guī)劃、控制及目標(biāo)檢測(cè)等模塊,并配套有Gazebo仿真測(cè)試代碼。
Prometheus系統(tǒng)可分為四大模塊,分別負(fù)責(zé)PX4飛控控制、SLAM建圖、任務(wù)及路徑規(guī)劃與視覺識(shí)別幾大核心功能。
P450飛行測(cè)試
阿木實(shí)驗(yàn)室的另一開源項(xiàng)目,基于MAVROS通信協(xié)議的ROS飛控控制項(xiàng)目PX4_Command現(xiàn)已作為基本控制模塊被整合到Prometheus V1.0中。可通過簡(jiǎn)單的控制指令接口,實(shí)現(xiàn)無人機(jī)的一鍵解鎖,起飛、懸停、降落、緊急上鎖、慣性系及機(jī)體系下的控制指令(位置控制,速度控制或者組合控制)以及軌跡跟蹤等操作。
P450 RGB-D建圖測(cè)試

在激光雷達(dá)SLAM的基礎(chǔ)上,阿木實(shí)驗(yàn)室一直在探尋其他采用不同傳感器的高效率SLAM方案。現(xiàn)在,除了經(jīng)典的Cartographer激光雷達(dá)SLAM建圖以外,P450的SLAM模塊還可通過DEMO腳本實(shí)現(xiàn)RTAB-Map、Octomap及RGB-D三維環(huán)境建圖等不同的SLAM方案,滿足各種室內(nèi)無人機(jī)的開發(fā)要求。
規(guī)劃模塊
P450 2D激光雷達(dá)AStar測(cè)試

P450的避障功能在規(guī)劃模塊的支持下,成為了變化最顯著的部分。在規(guī)劃模塊的DEMO中,P450可通過掃描范圍大幅升級(jí)的激光雷達(dá),根據(jù)現(xiàn)場(chǎng)情況和數(shù)據(jù)輸入選擇APF局部規(guī)劃,VFH局部規(guī)劃和A*全局規(guī)劃等不同的算法實(shí)現(xiàn)路徑規(guī)劃與避障,并比較個(gè)中差異,實(shí)現(xiàn)對(duì)不同環(huán)境的優(yōu)化和適配。
另一方面,阿木實(shí)驗(yàn)室意識(shí)到激光雷達(dá)在一些條件下具有一定的使用限制,因此一直在尋求完全基于視覺的無人機(jī)自主飛行規(guī)劃算法。現(xiàn)在,P450可以直接通過Fast-Planner,一組由港科大開源的快速路徑規(guī)劃算法,實(shí)現(xiàn)在樹林等復(fù)雜環(huán)境下的實(shí)時(shí)避障與路徑規(guī)劃。智能無人機(jī)的開發(fā)已真正邁入視覺時(shí)代。
P450 二維碼降落測(cè)試
在標(biāo)配一臺(tái)可上下90°翻轉(zhuǎn)的單目攝像頭后,視覺識(shí)別與目標(biāo)檢測(cè)成為P450的核心功能之一。基于Opencv的圖像識(shí)別,P450機(jī)載系統(tǒng)中包含了豐富視覺識(shí)別。可實(shí)現(xiàn)包含數(shù)字識(shí)別,橢圓檢測(cè),多二維碼檢測(cè),顏色識(shí)別,YOLO通用目標(biāo)檢測(cè)和框選跟蹤在內(nèi)的多種識(shí)別算法,以及基于視覺的無人機(jī)位置控制。
除上述描述的功能以外,P450機(jī)載系統(tǒng)Prometheus V1.0將保持持續(xù)的免費(fèi)更新,在未來支持更多Prometheus項(xiàng)目中集成的算法與功能。
技術(shù)參數(shù)
飛行器類型:四旋翼
飛控核心:Pixhawk V4
機(jī)載計(jì)算機(jī):Nvidia Jetson Xavier NX
機(jī)載系統(tǒng):Prometheus V1.0
重量(約):1550g(不含電池),1950g(含電池)
尺寸:335mm*335mm*230mm(長(zhǎng)*寬*高)
對(duì)角線軸距:410mm
最大有效載荷:1600g
最大起飛重量:3550g
供電電池:格氏5300mAh
供電電壓:14.8V-16.8V
懸停精度:±1m(GPS下)
抗風(fēng)等級(jí):3-4級(jí)
工作環(huán)境:室內(nèi)/室外
遙控器:富斯FS-i6S
可選裝傳感器:單目相機(jī)
雙目相機(jī) Intel Realsense T265
深度相機(jī) Intel Realsense D435i
激光雷達(dá) 思嵐 S1
……以及更多
配套資料
P450擁有Github項(xiàng)目、產(chǎn)品Wiki及官方使用說明的技術(shù)支持。此外,P450還提供與真機(jī)功能相對(duì)應(yīng)的ROS仿真教程。通過阿木實(shí)驗(yàn)室提供的第一版仿真鏡像“amovlab-prometheus-v1.iso”,用戶可通過在電腦上安裝鏡像的方式,直接解決在配置仿真環(huán)境的過程中遇到的種種問題,快速上手開發(fā)工作。同時(shí),P450無人機(jī)也可與阿木實(shí)驗(yàn)室的相關(guān)課程配套使用,幫助無人機(jī)開發(fā)者度過從原理入門到獨(dú)立開發(fā)的學(xué)習(xí)過程。
Prometheus自主無人機(jī)開源項(xiàng)目:
https://github.com/amov-lab/Prometheus
P450 官方WiKi:
https://www.amovlab.com/document
P450 視頻使用教程:
https://space.bilibili.com/432575320/channel/detail?cid=168828
鉑貝學(xué)院:
https://bbs.amovlab.com/plugin.php?id=zhanmishu_video:video